Underwater ROV
- zhiyuan zhang

- Dec 6, 2021
- 2 min read
I was the EECS lead for my highschool's underwater robotics team, which had sone decent result in competition (2nd and 5th place in international competition)
A picture of the robot
In this version, the motor configuration is not symmetrical between 2 side. 3 horizontal motor is mounted in 120 degree apart, thus with correct thrust control, it can perform any thrust vector on the horizontal plane.

A video of the robot
My electrical System working underwater
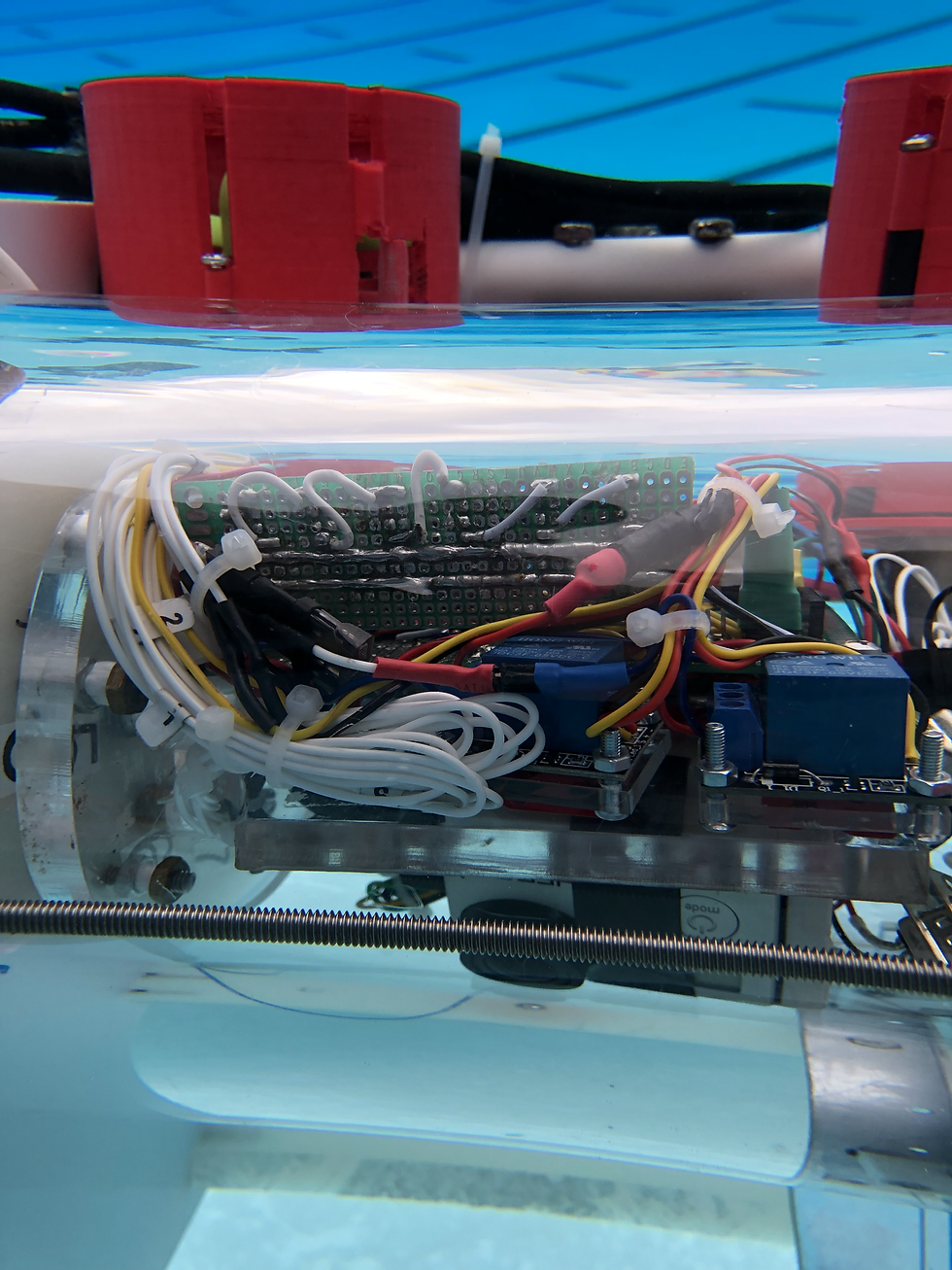
My work in on the electrical, communication and software system of the ROV.
This is the water right tube that houses all the control electronics, cameras, and some of the sensors.
These stacked PCBs are DC motor controller, which control the torque of whatever motor we need to run using PWM control.
The relays on the side are for electro magnets .

There are 3 cameras for this version of the ROV for forward, backward and downward view.
2 GoPro which output analog AV signal we directly transmit, and in he middle there is a IP camera. The IP camera's signal will be sent to a Fathom-X interface broad, which will encode the ethernet signal into 2 wire.
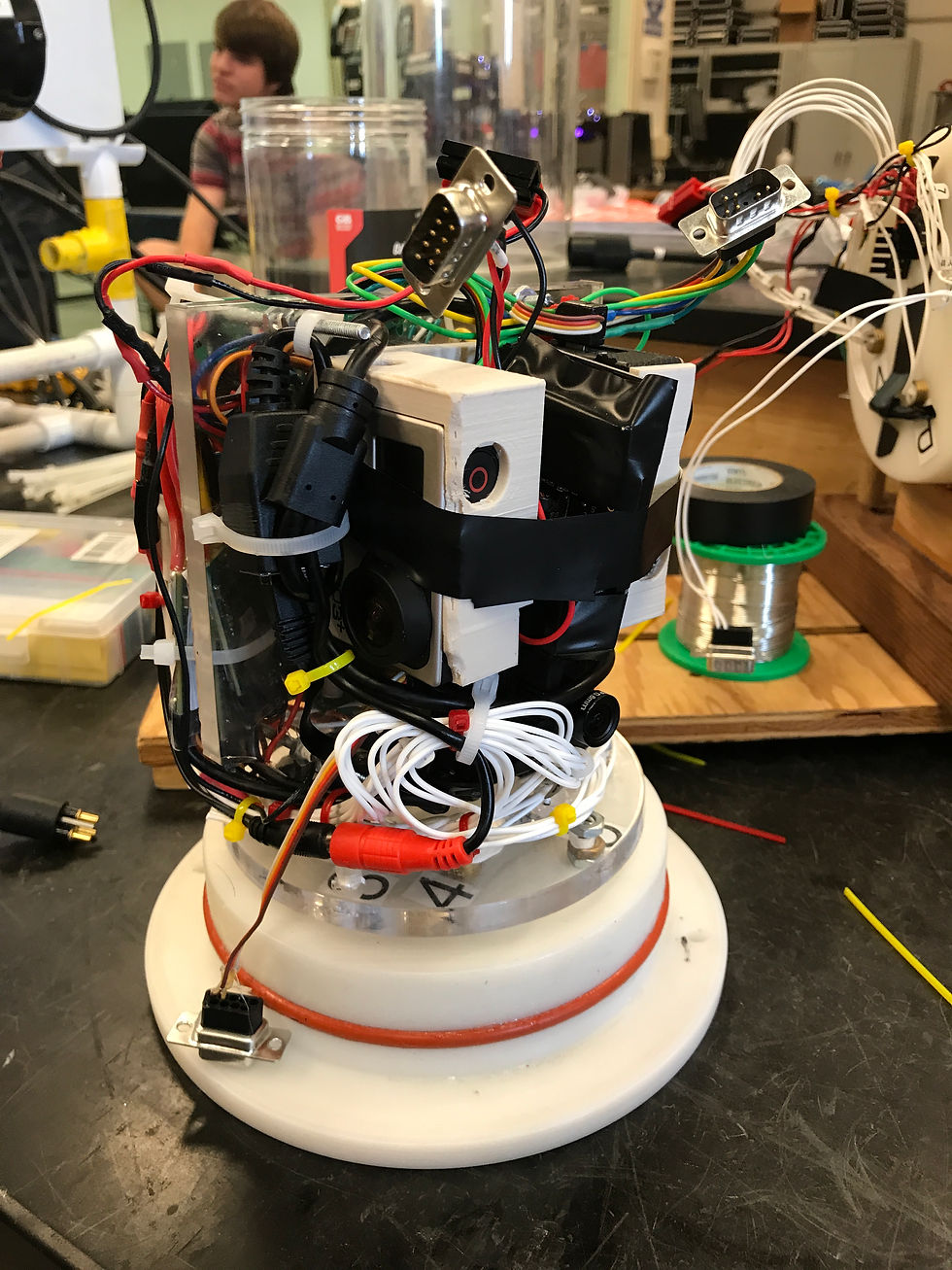
On the side, it is the brushless AC motor controller.

The IMU and stepper motor controller for the ROV.
The IMU will sent data to the Arduino, which will perform PID control on the ROV to stabilize it.

The entire assembly fits in a acrylic tube, with 2 cap and O ring on the side to seal it. It is water tight for 12m tested. (It was tested in NASA NBL pool)

Water proof wiring going through the sides to provide power, communication and control to the actuators.

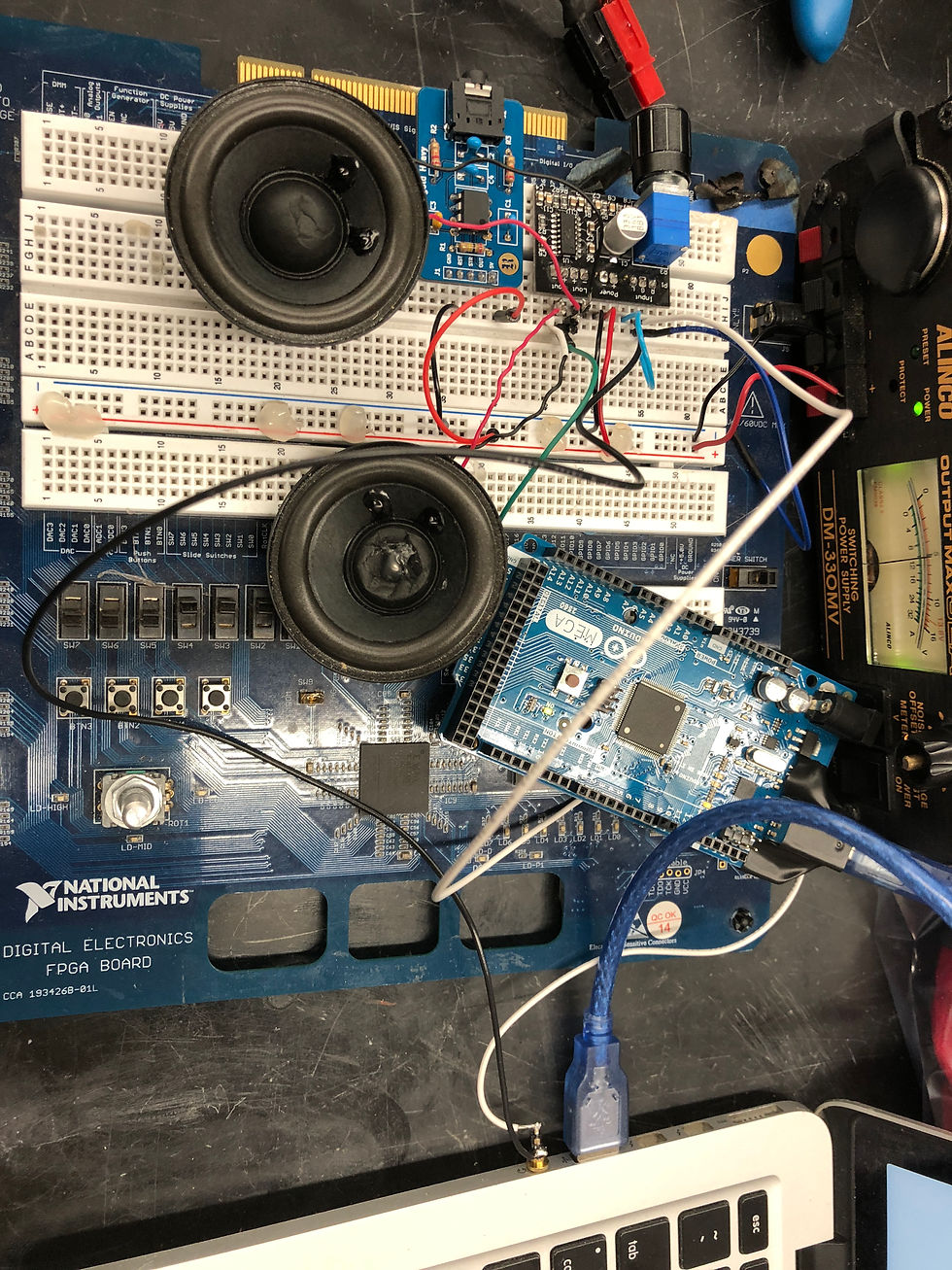
Prototype underwater acustic signal transmission. Successfully transmitted a few bits of data underwater.
The control box for.the ROV., which have.1 screen for backward facing camera.

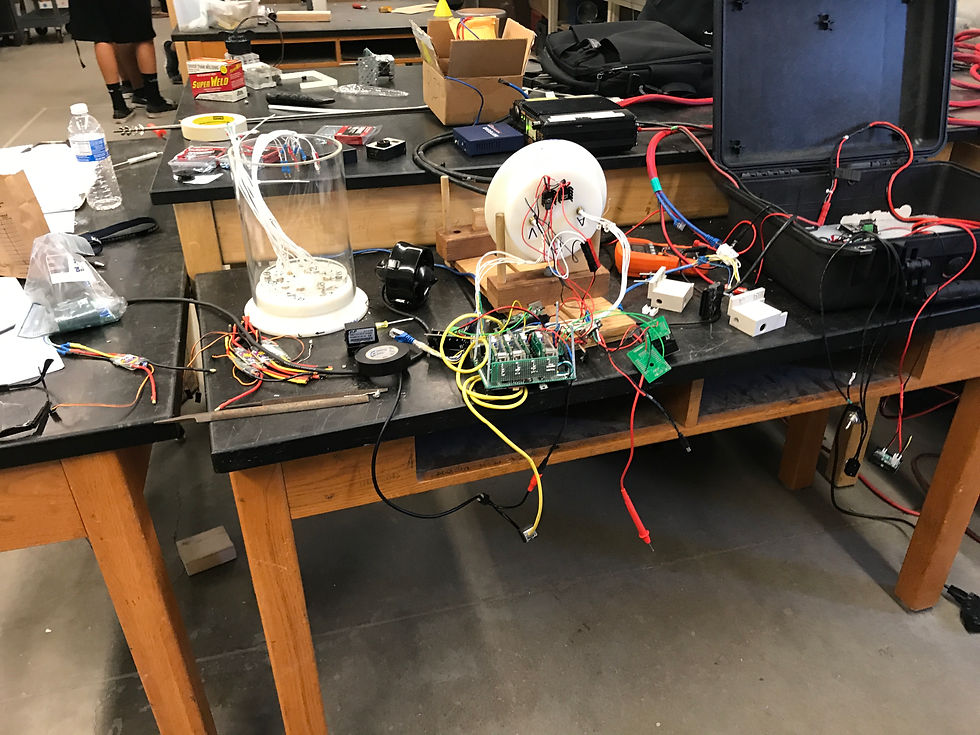
The wiring and testing of the communication system. All the signals go through 2 CAT5 ethernet cable, the cable is specially balanced to be neutrally buoyant.



Comments